
最新バージョン情報
What’s new in V2025
RecurDyn 2025が、2024年11月にリリースされました。主な新機能をご紹介します。
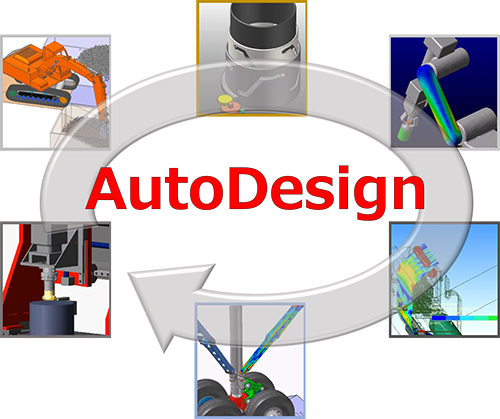
RecurDyn/AutoDesign
RecurDyn/AutoDesignは、実験計画法、メタモデル技術、および数値最適化技術を統合したRecurDyn専用の効率的な設計最適化ツールです。
RecurDyn/AutoDesignの特徴
- RecurDynとシームレスな直感的インターフェースにより、設計変数と目的関数を容易に定義、およびカスタマイズが可能です。
- 世界初のプログレッシブメタモデルアルゴリズム、および以下の最適化技術により、非常に少ない試行回数での最適化が可能です。
ー 設計変数のスケールが異なる問題を解決するマルチスケール最適化技術
ー 目的数に関係なく使用できる、簡単で強力な多目的最適化アルゴリズム - 設計変数として、パラメーター値や弾性体形状を使用できます。
- 目的関数や制約条件には、数式/弾性体応力結果/結果スコープ/ProcessNetを使用できます。
二輪小型モビリティ事例
安定姿勢制御のための最適なフィードバックゲインの同定
- 要件
-
- モビリティは静止状態から 2m/s まで加速
- 目標速度と実際の速度差を最小化
- ドライバーは安全な姿勢を維持
設計変数:フィードバック制御におけるP,I,Dゲイン
目的関数:ターゲットとの速度差
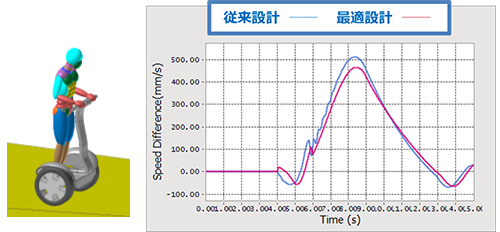
速度差のグラフ
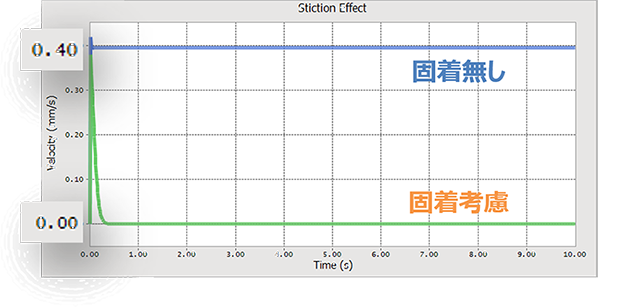
Geo接触グループの固着考慮
Geo接触グループ(※)での摩擦力計算における固着考慮が可能になりました。これにより、CAD形状を使用した接触定義において、静止状態で滑りの無い固着の設定が可能です。
※Geo接触、Geo球接触、Geo円筒接触、Geo面・カーブ接触、Geoカーブ接触(2D/3D)、Geo円接触、Geoカーブ・球接触、Geoロール接触
-
斜面上でブレーキ作動時の鉄道モデル (固着無し)
-
斜面上でブレーキ作動時の鉄道モデル (固着考慮)
鉄道の車両速度(mm/s)
Geo接触グループの接触力計算オプション
Geo接触グループ(※)での各接触判定点での接触剛性の配分方法に新手法 “MPM(Maximum Penetration Method)” を追加しました。これにより、従来手法では接触点数の増減時に発生することのあった接触力の振動が解消され、滑らかな接触力が得られます。
※Geo接触、Geo球接触、Geo円筒接触、Geo面・カーブ接触、Geoカーブ接触(2D/3D)、Geo円接触、Geoカーブ・球接触、Geoロール接触
Geo接触 接触力計算手法の比較 (左:従来手法CPM、右:新手法MPM)
Geo接触グループの摩擦熱計算
Geo接触グループ(※)の計算で摩擦熱の計算機能が追加され、グラフで摩擦熱を確認することが可能になりました。(剛体同士の接触、剛体と弾性体の間の接触、弾性体同士の接触、いずれの接触定義でも摩擦熱の結果確認が可能です。)
また、F-FlexボディにGeo接触を設定している場合、摩擦によって発生した熱による伝熱解析も可能です。
※Geo接触、Geo球接触、Geo円筒接触、Geo面・カーブ接触、Geoカーブ接触(2D/3D)、Geo円接触、Geoカーブ・球接触、Geoロール接触
歯車のかみあいによって発生した摩擦熱による伝熱解析
F-Flex 伝熱解析の高速化係数
熱伝達、および熱伝導率をスケール倍することにより、熱の伝わる速度を変化させる機能が追加されました。スケール倍の設定には数式の使用が可能であるため、解析初期では1より大きなスケール倍を設定して高速に熱変形の安定状態を求め、安定状態以降は1をスケール倍に設定することにより、熱変形が安定した時点以降の解析には指定した物性での伝熱解析を行うことが可能です。
バイメタル温度計 右の端部に100℃与えた際の比較 (上:高速化係数無し(=1)、下:高速化係数5)
F-Flex Geoロール接触
ロールtoロールのシート送り出し/巻き取りを容易に行うことのできるGeoロール接触が追加されました。
Geoロール接触では、巻き初めのポイントである参照節点の情報を使用し、2周目、3周目・・・と自己接触を考慮してシートが重なるのと同じように、円筒ローラーに巻き付く半径が変化させ、これにより、自己接触するよりも大幅に低い計算負荷で巻き取り計算が可能です。
ウェブの巻き取り
ベルトの巻き取り
Bearing KS 軸受の回転抵抗考慮
オイルやグリースによる回転抵抗トルクを考慮したベアリングモデルの作成が可能になりました。
EV用ギアボックス 発進時のベアリング回転抵抗
その他の新機能
- Professional
-
参照座標系を設定した断面表示
単純形状接触のフォースベクトル追加(各軸方向成分、垂直力、摩擦力)
剛体コンター表示で滑り速度、PV値に対応
- MTT3D
-
距離センサーのセンシング対象選択機能(両面/表面/裏面)
ガイド速度の数式設定
- Data Driven Design
-
準静的つりあい解析を使用したCMM解析結果からの応力/ひずみ計算
- Gear KS
-
かみ合い剛性の出力
参照座標系を設定した断面表示 (フォークリフトのフォークに追従した断面表示)
CAD data by An Engineer, Kathzerrato and AJ Stauffer
剛体コンター表示(PV値)
-
MTT3D ガイド速度の数式設定
-
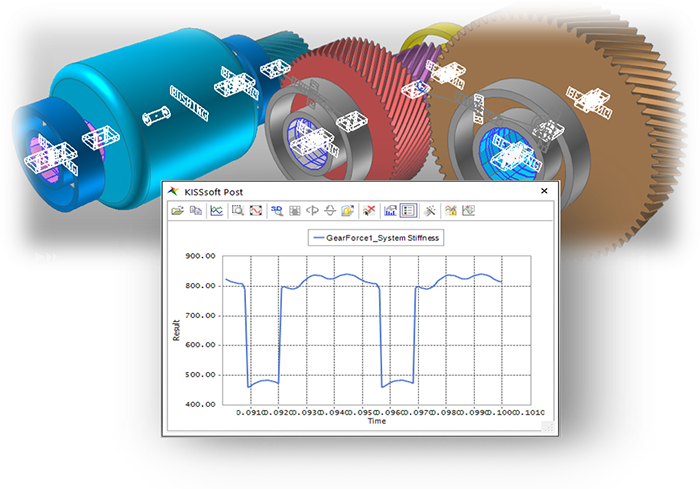
Gear KS かみ合い剛性の出力